Otvinta Cube Solver Application - Project Day 1

initial Approach
I have been on and off working on this robot using the Otvinta application. This is a demo app that solves the cube and does not allow me to make modification to the algorithm. However, I though this was the easiest way to get it up and running and validate the robot is functional.
As usual, there is no such thing as an easy project… especially when you are going at it half ass. I decided to give it a proper respect and approach it correctly. I blocked off about 5 hours at the HackerSpace to work on it. I referenced the instruction provided in the Youtube video below for calibrating the servos and camera.
https://www.youtube.com/watch?v=G8kEdBBw1aY&t=151s
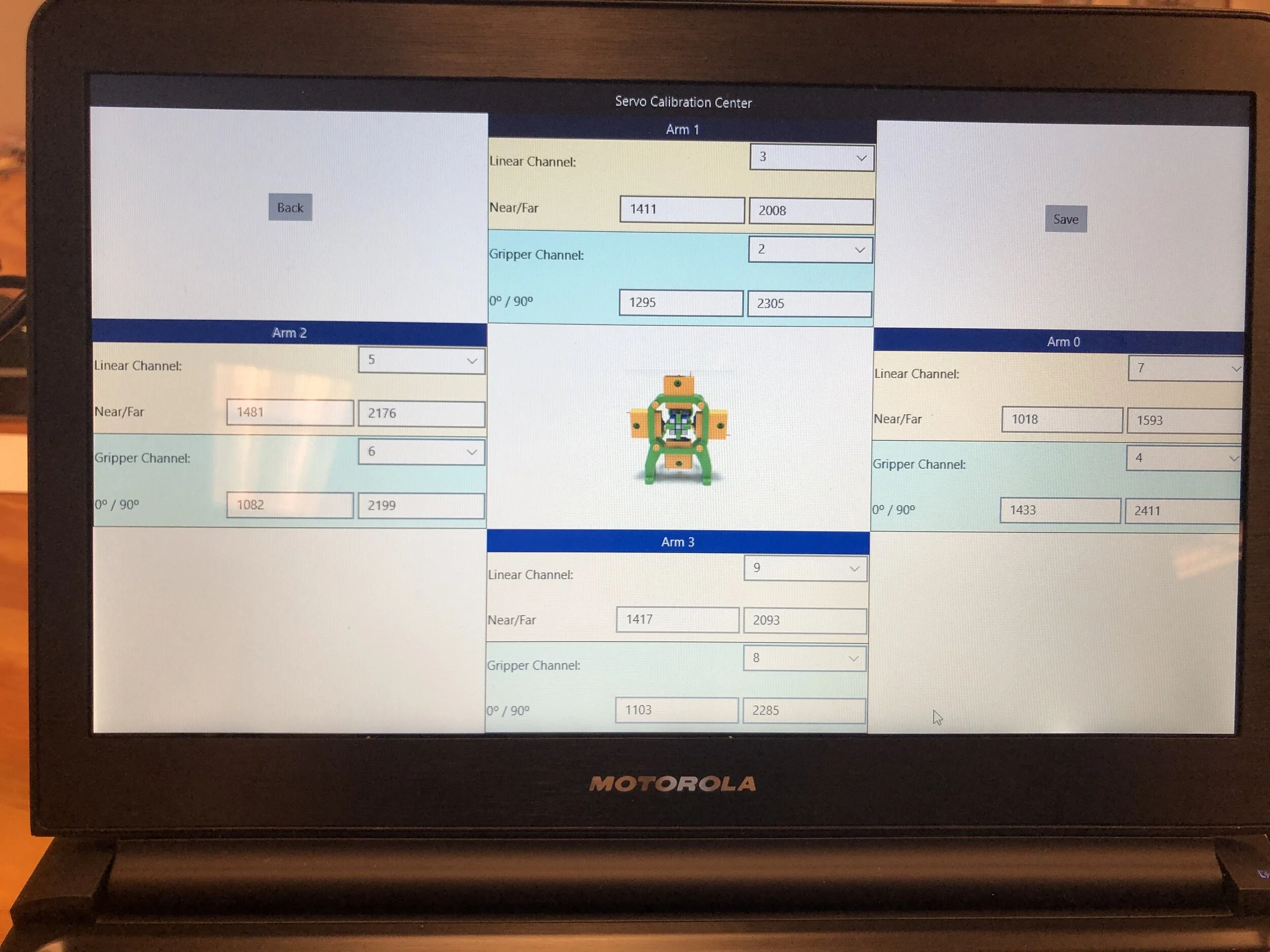
It took me some time testing out the components and fixed some of the hardware installation problems. After calibrating the servos, I ran into the problem with getting the camera to focus. After burins about 30 minutes, finally was able to get it focus by removing the casing that holds the lens (it came off loose). Once the camera was focused, next problem was that the camera was too close to the cube and it did not show whole cube. After about an hour of messing with the camera (decided to get rid off the rear casing to gain a little more space) I managed to show all 6 cells of the cube on the camera.
failed to run properly
After about 4 hours in to the project, all the configuration was complete and it was time to test run. Robot seems to work as the arms move simultaneously closing and taking the picture of the cube. However, when I “run” the app, it starts to move, getting the images of the current cube position, but the side arms turn half way starting the crush the cube. I tried to reset all the components, did a bit of web search, consult with the experts with no clear answer.
This is one of those engineering moments where just keep banging my head into the wall is not going to get me further. No need to get frustrated, as these type of “stop and go” is a nature of engineering. Oh well.. time to step back & re-assess the situation and determine what needs to be changed
next step
As always, it is a good idea to conduct a proper “research” before beginning the execution (which I did not). After spending some time reading through the information I have previously gathered, I found that there were some instructions at the Otvinta site that needs to be followed closely.
http://www.rcr3d.com/hardware.html
https://www.pololu.com/category/102/maestro-usb-servo-controllers
There are some specific configuration required using the Pololu Maestro application which I was not aware (see below screenshot). Next step is to follow the instruction closely and give it a try again.
Lessons learned
Engineering is hard - Never underestimate the problem no matter how easy it seems
Conduct proper research & develop a gameplan (Plan of Attack & Possible outcomes)
Secret to Success: Prepare, Fight hard, and Learn
