Otvinta Cube Solver Application - Project Day 2

DAY2 APPROACH
This time I followed the instruction from the Otvinta site very closely http://www.rcr3d.com/hardware.html
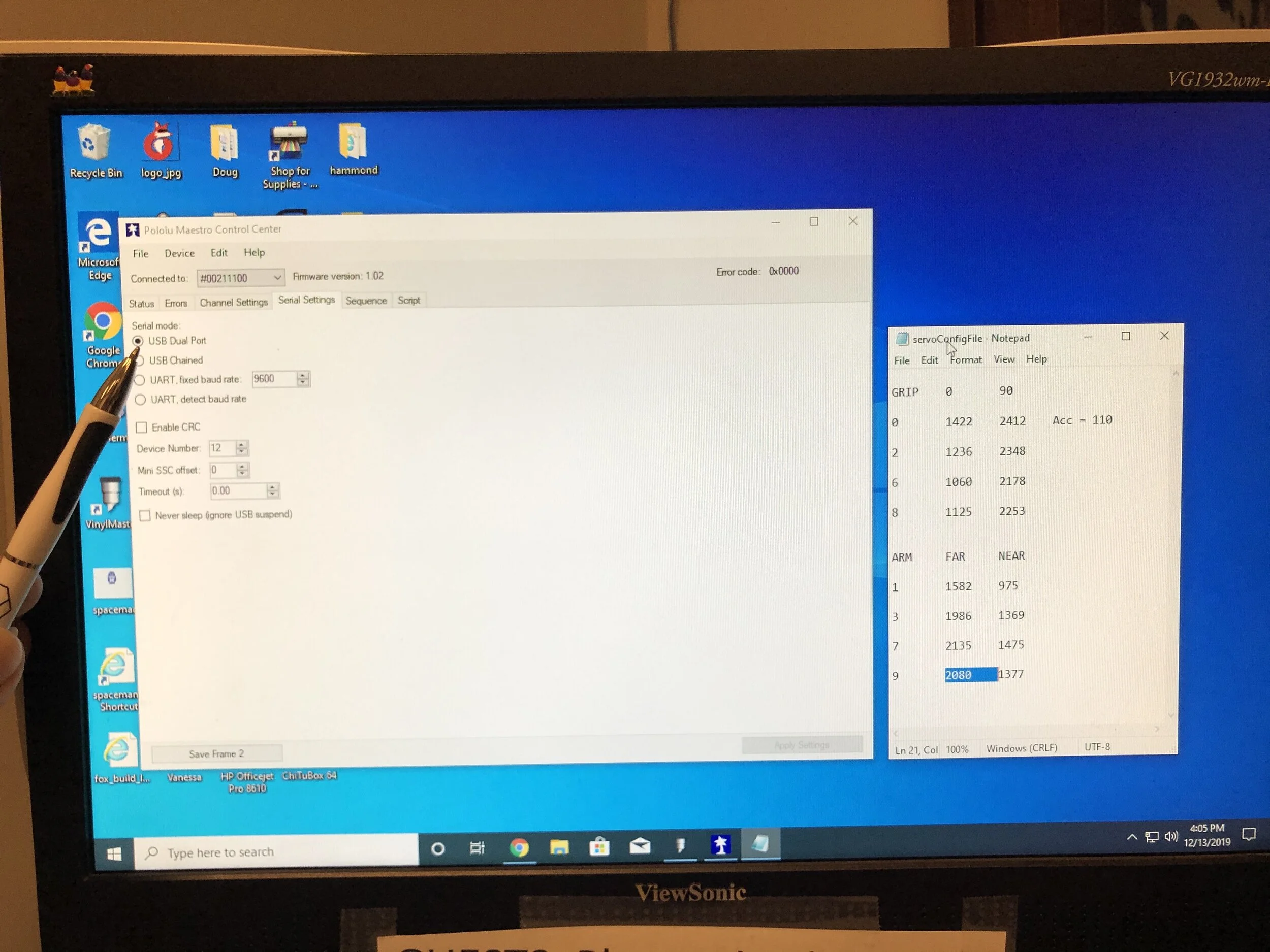
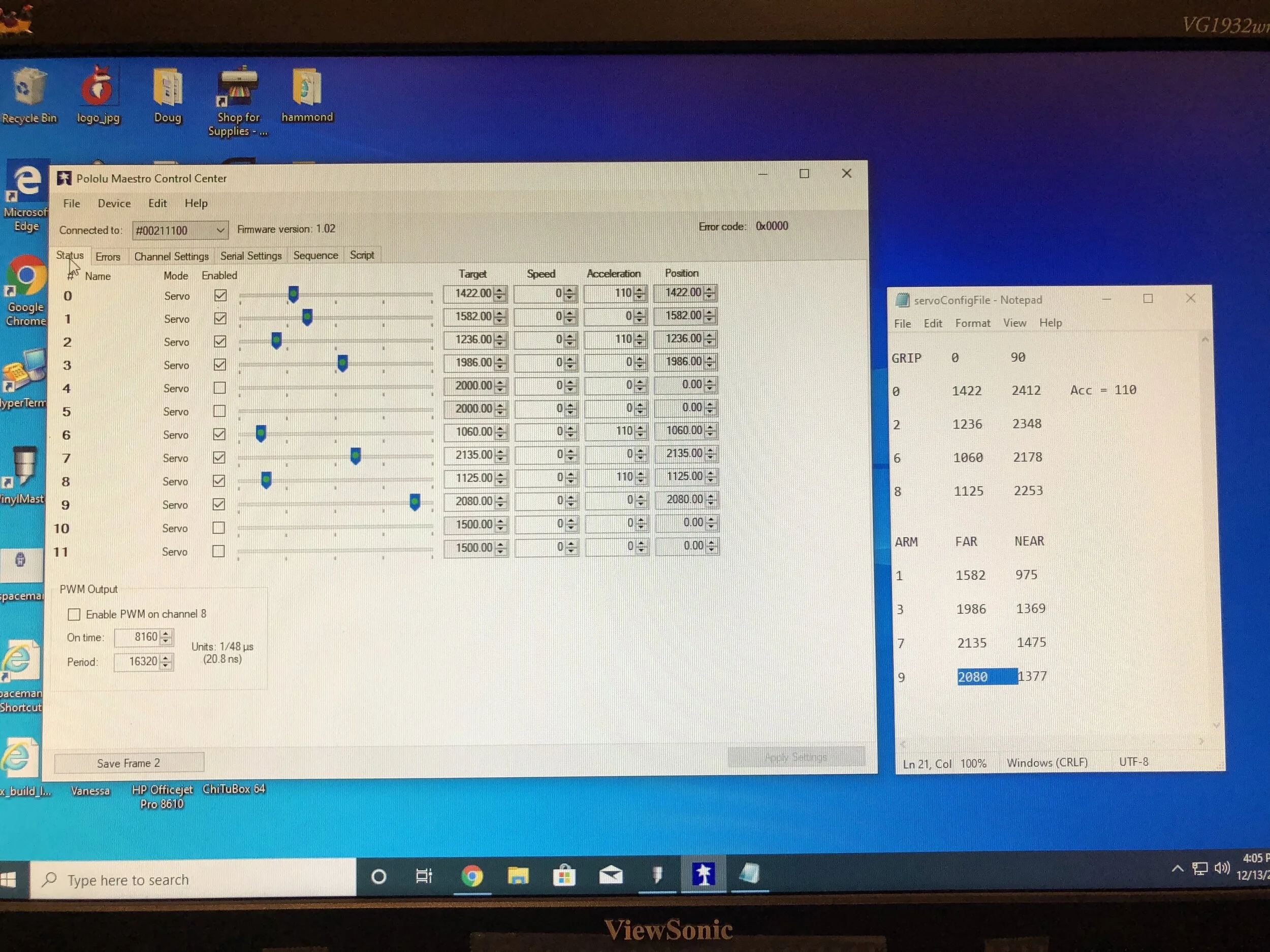
I paid special attention to make sure all the servos are configured correctly (position numbering, calibration etc) and the configuration of the Pololu Maestro Control Center app (USB Duel Port, Acceleration for Servo 0, 2, 6, and 8). Also double checked the camera to ensure it is focused and can identify the colors correctly.
STILL FAILED TO RUN PROPERLY
After all the configuration was done and tested, I ran the robot again. I hoped for the best, but the issue with the side grip arms turning half way was still there. (WIP - Youtube video)
In order to isolate the problem, I tried different approach in running the program
Run several times in a row to see if the problem is happening at the same stop - In most cases, the problem happened at the same spot. In one occupation, the problem happened later time (WIP - Youtube video)
Run the app without the cube to see if the camera’s detection has anything to do with it - This did not have any impact
Swap out the Servo cables on the Servo Controller to see if it will move the problem to other servos - Swapped Left with Top & Right with Bottom. The half turning problem now happens to the Top & Bottom grip arms.
ASSUMPTIONS & NEXT STEP
WIP - Contact Otvinta for help!
