PROJECT: Biped Self Balancing Humanoid Robot - Bare metal robot using hobby servos
The blog post on TechnologyX2 discusses the author's decade-long experience with autonomous drone technology and biped (two-legged) humanoid robots. The focus is on a recent project involving a simple bipedal robot built with hobby servos and a 3-axis gyro sensor. This sensor helps the robot maintain balance by detecting angular changes and responding with compensatory movements. Inspired by advancements in robot soccer players and the Thousand Brains theory by Jeff Hawkins, the author aims to explore new theories and applications in robotics, starting with the basic construction of the robot's lower half using high torque servos. The project is seen as a long-term endeavor, continuing the author's exploration of AI and robotics. For more details, you can view the full post [here](https://www.technologyx2.com/blog_hightech/2021/6/6/project-bipedal-self-balancing-humanoid-robot-bare-metal-robot-using-hobby-servos).
A better part of my last 10 years have been spent working on the autonomous drone technology and a biped (2 legged) humanoid robots. Just like Dr. Guero’s passion projects (reference here), I also believe the advanced movement of a human body comes from the human intelligence. Although the drone technology provided limited amount of success, my research related to Biped humanoid was very much a stand still. As such, I took a detour last few years focusing on various other AI technologies specifically on the Reinforcement Learning applications in the robotics. However, I recently run in to a Korean Roboticist who is working on building soccer playing robots. Unlike the wheeled soccer playing robots where the technology have advanced greatly during the last several years, soccer playing humanoid is still at an infant stage. The biggest huddle is to have the humanoid robot walk without falling down. It is true, despite of all the videos you see about the dancing robots from Boston Dynamics, rest of us are having hard time keeping it from falling down.
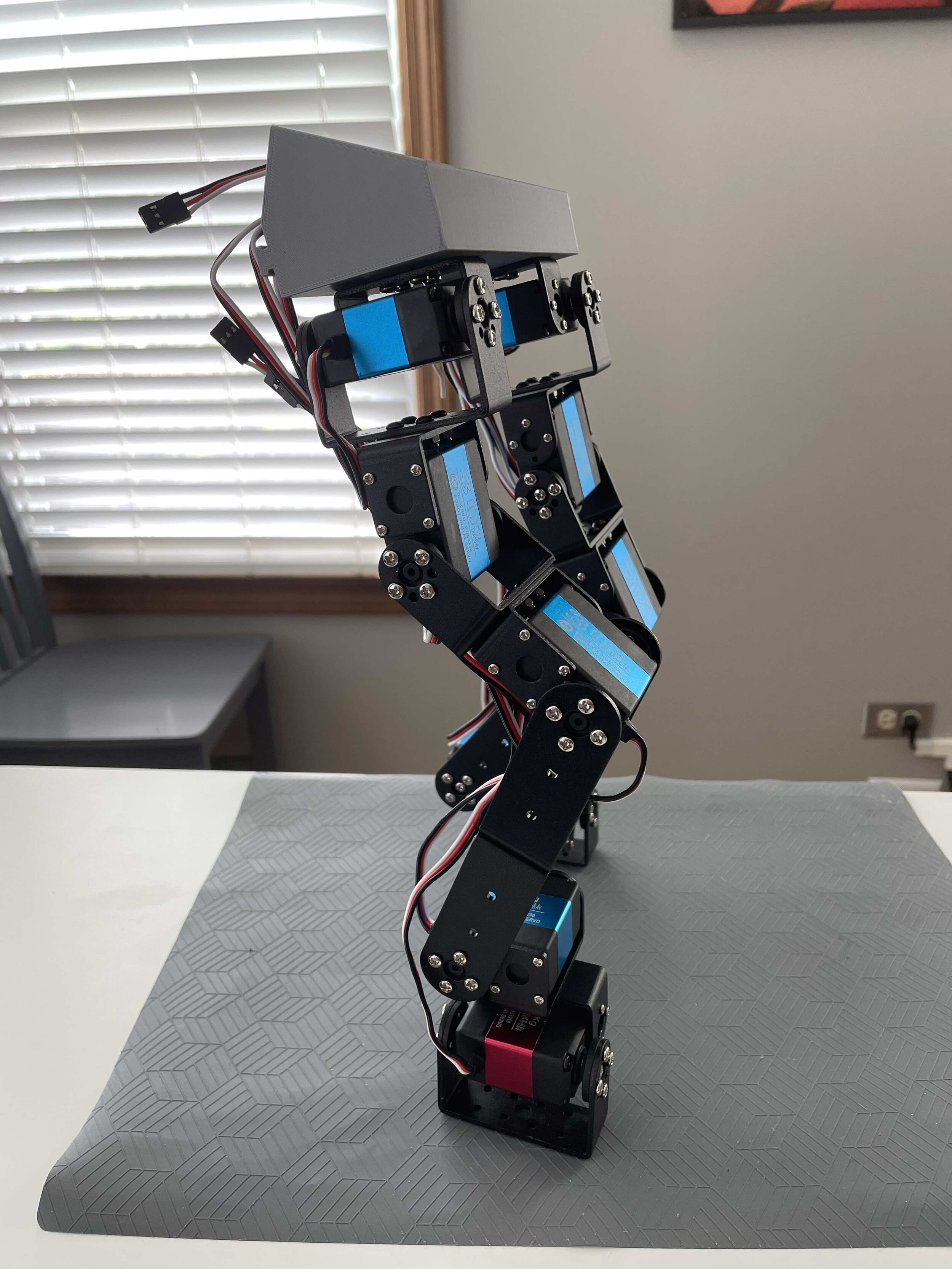
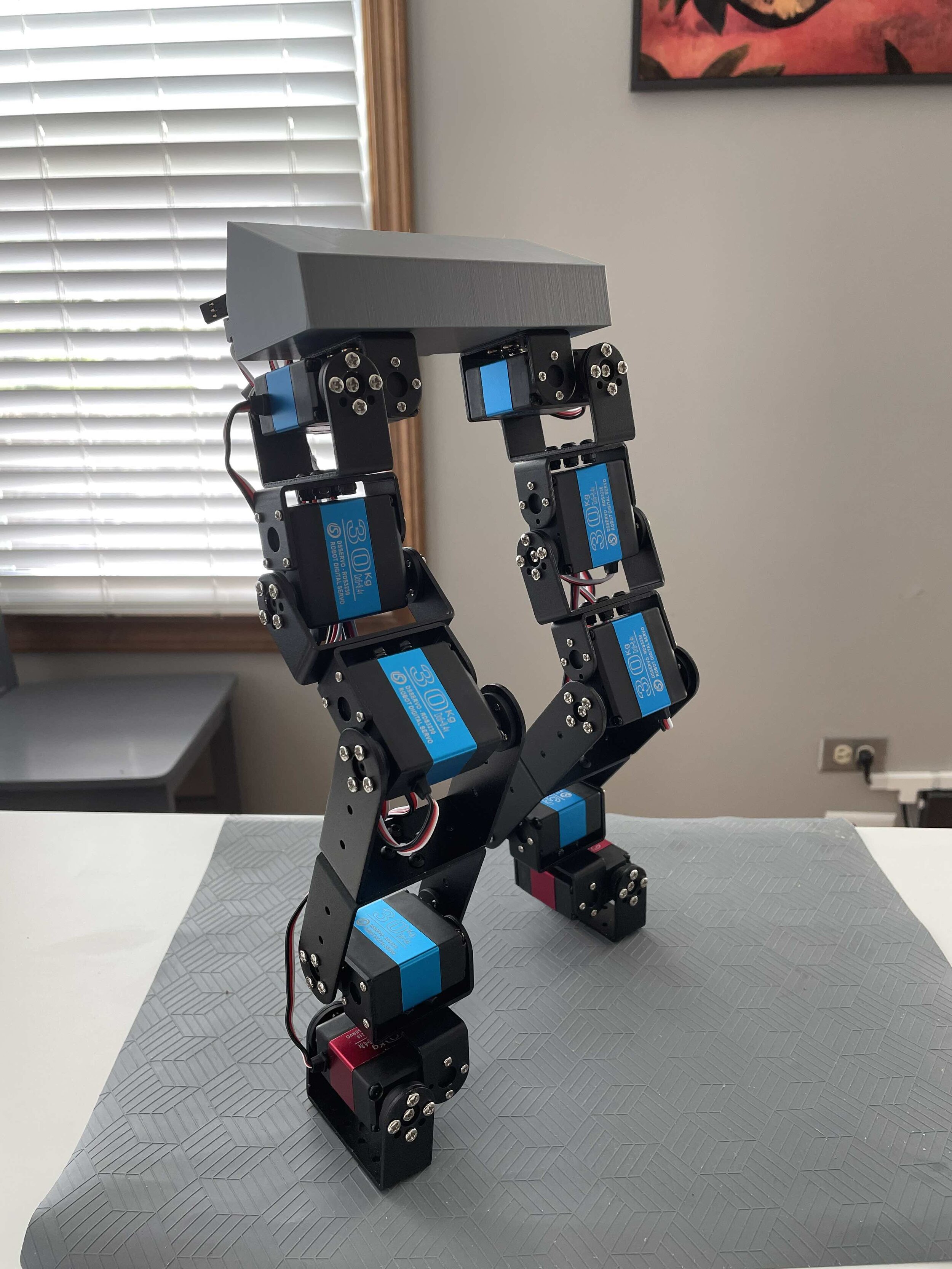
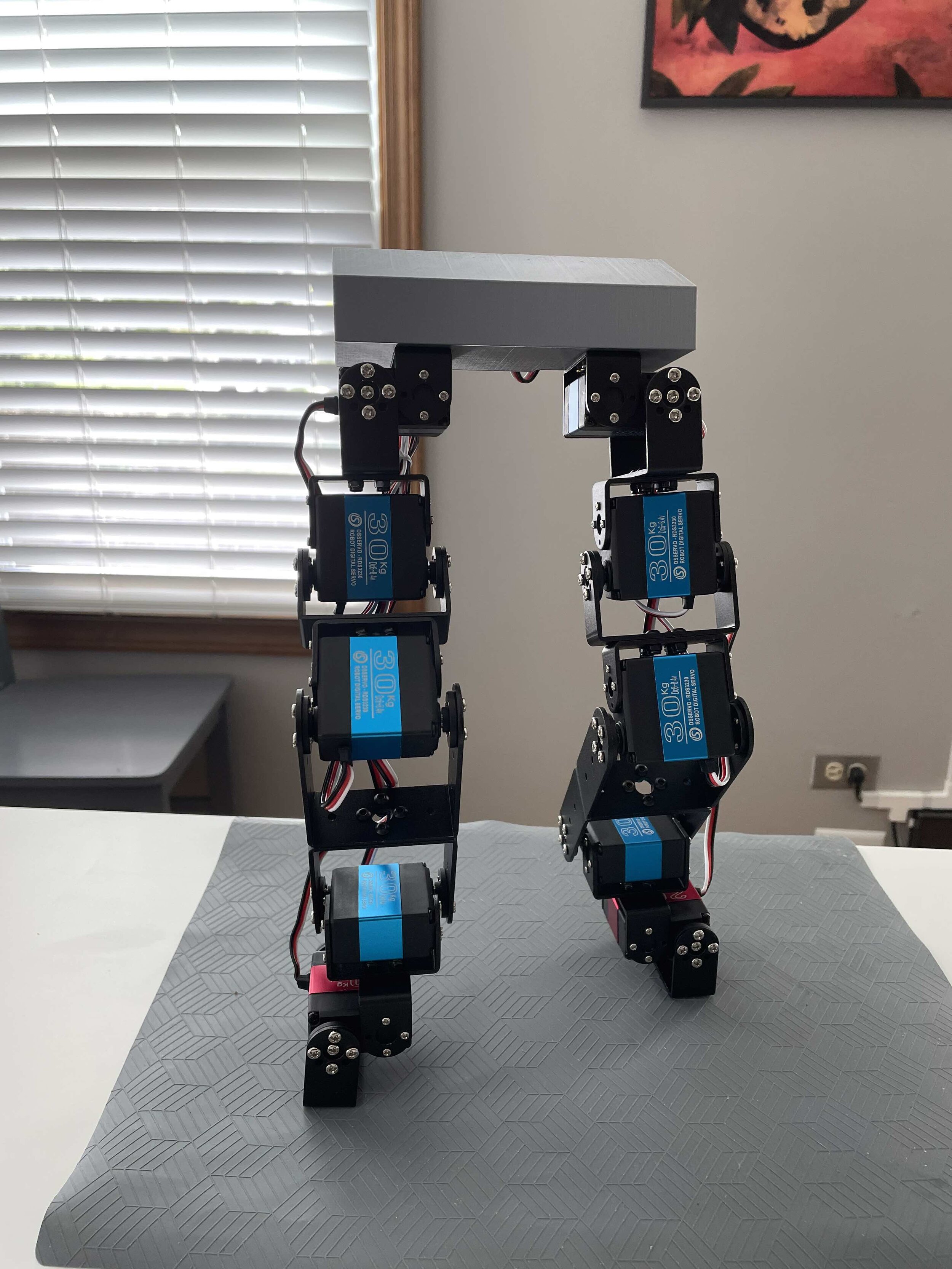
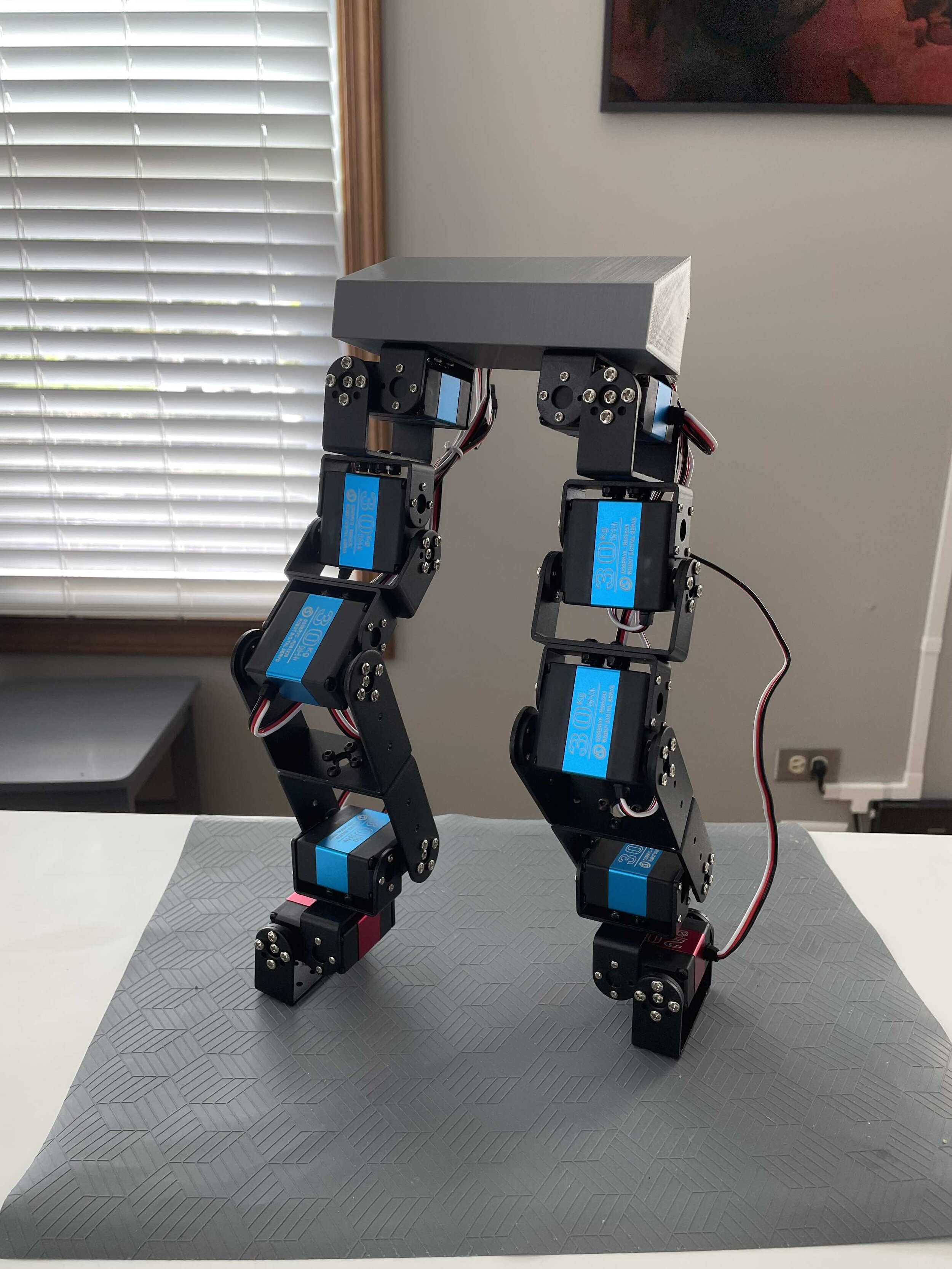
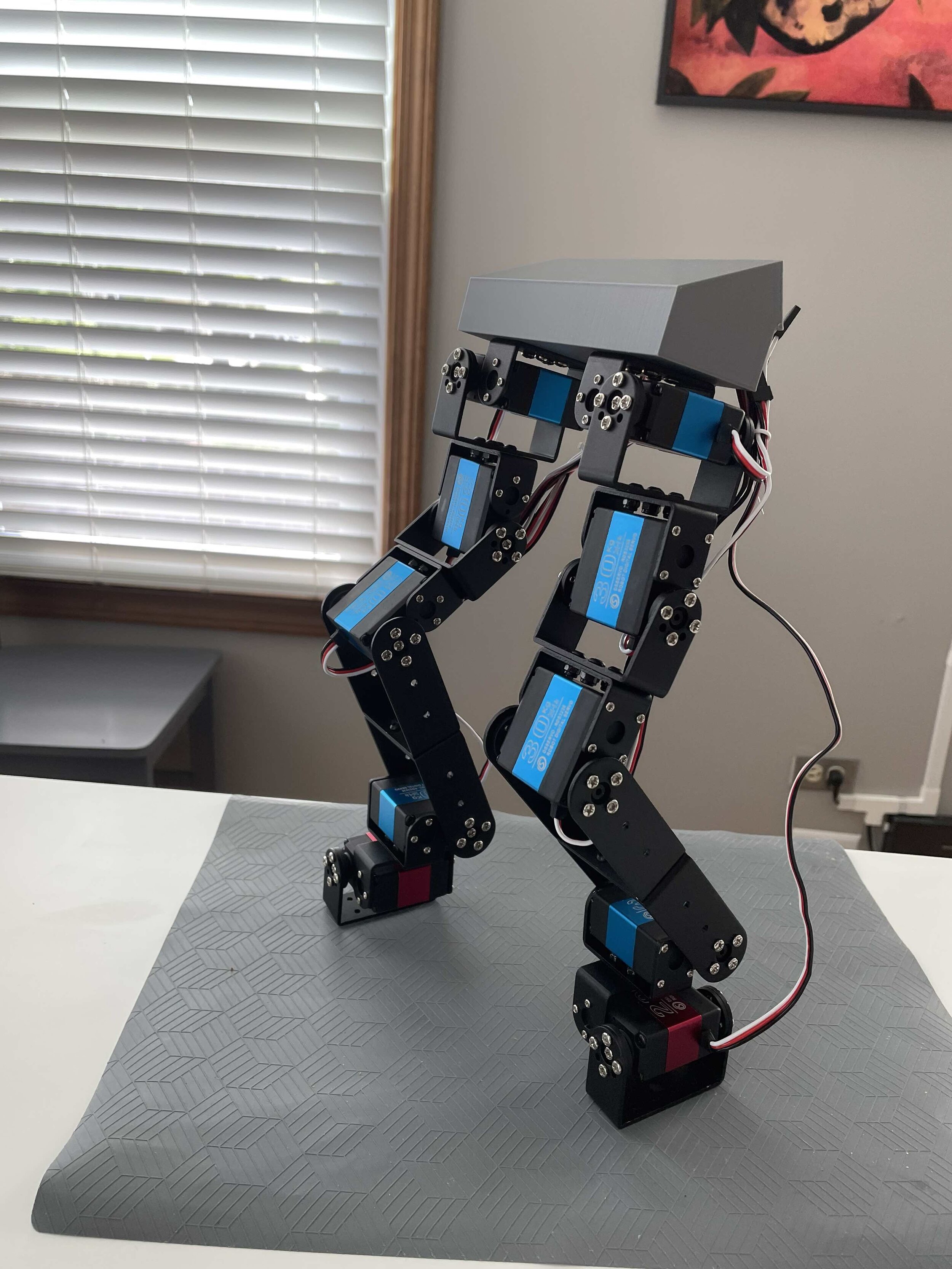
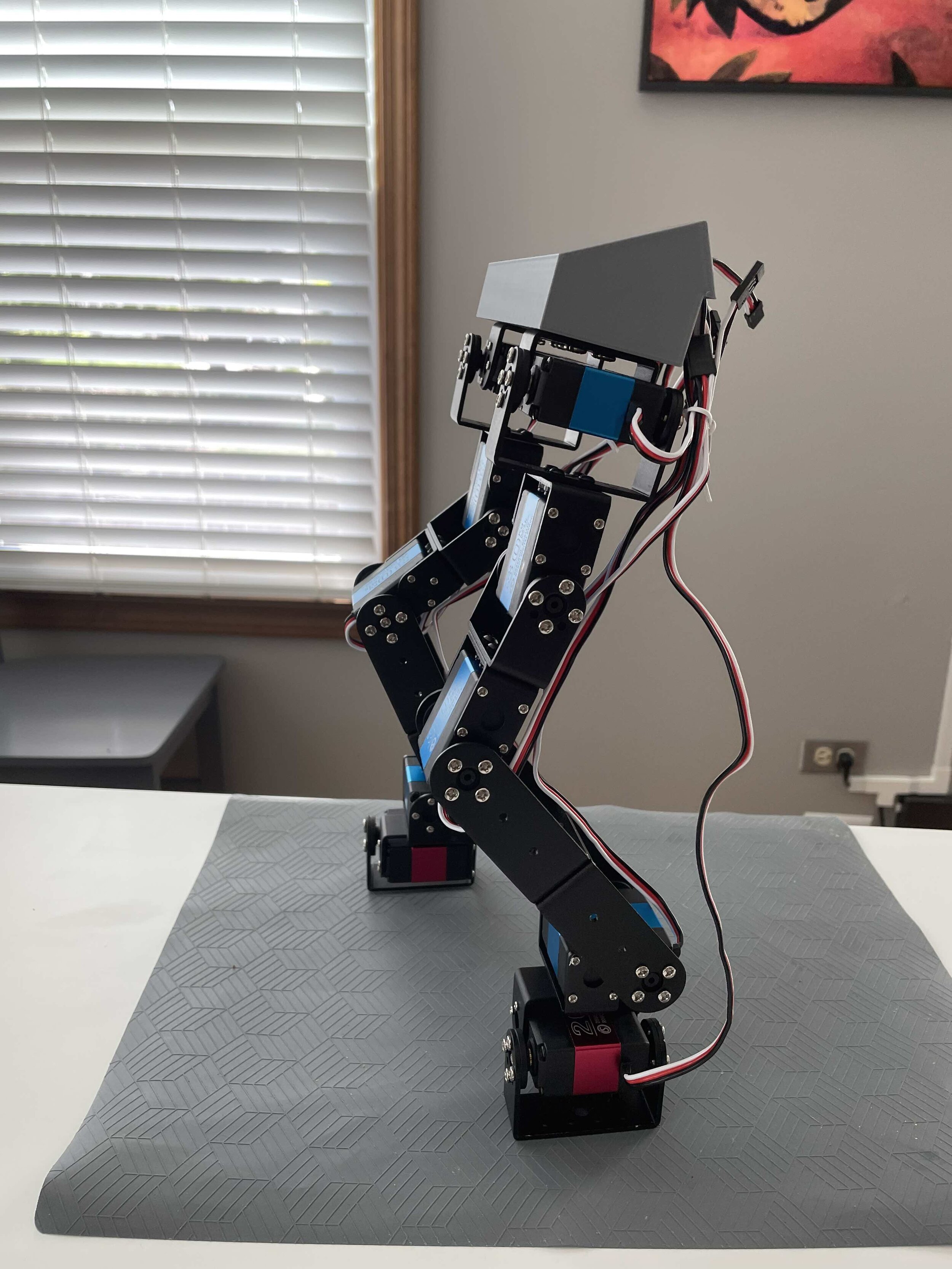
As you can see from the Youtube video above, it is a simple bare metal robot made of 3 hobby servos on each leg. There is a 3 axis gyro sensor on the robot’s torso that detects angular change from the side to side. Once the external force is applied to it, the robot compensates the push by momentally kicking out the leg on the same side. This counter action is enough to keep the balance and prevent the robot from falling down. Notice the robot’s foot is tiny, so the balance is all coming from the robot’s sensors.
This got me really inspired and I wanted to get my bipedal project back up and ultimately test out a newly learned theory (Thousand Brains theory by Jeff Hawkins; more in the future). I know this will be another long and grueling journey, so I am purposely going to go slow and steady. However, armed with the Dr. Hawkin’s new idea, I might be on to something this time. (Well, this is what I said about 10 years ago).
So I cobbled up my hobby servos and robot frames, this time using high torque servos just to make sure the robot have enough strength, built the lower half of the robot. Once some of the initial experiments are done to validate a few things I have in mind, I will be adding a servo with some weight on top to represent the weight of the upper body. Well, another 10 years. Let’s Go!
By the way, if you have not see it yet, here are some of the bipedal humanoids videos you must see. Maybe you might get inspired to start your own crazy projects.